Developing Bluetooth Location Services Applications#
Bluetooth Location Services include applications for Channel Sounding, Direction Finding (Angle of Arrival and Angle of Departure), Triangulation, and Trilateration.
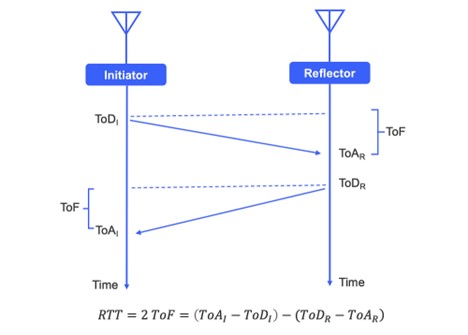
Channel Sounding is a method for estimating distances between two devices, designated as the initiator and the reflector. They exchange information across 72 RF physical channels with the initiator transmitting first, followed by the reflector's response. This alternating transmission and reception enables precise distance measurements. The technique employs Round-Trip Time (RTT) or Phase-Based Ranging (PBR) or both for accurate coordination across the 2.4 GHz spectrum. It also supports one to four antenna paths to improve measurement accuracy and reliability.
Round-Trip Time
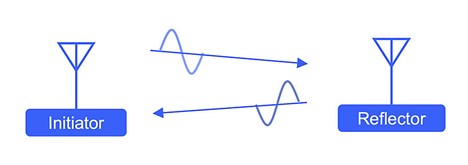
Phase-Based Ranging
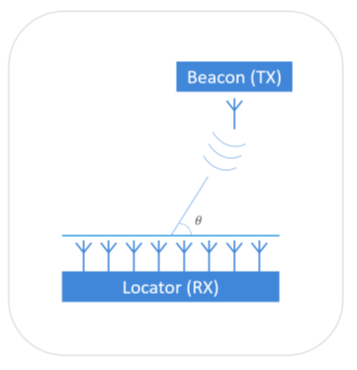
The two Direction Finding systems are Angle of Arrival (AoA) and Angle of Departure (AoD). With these technologies, the fundamental problem of locationing comes down to solving the arrival and departure angles of radio frequency signals.
The content on these pages is intended for those who want to experiment with or are already developing a Bluetooth Channel Sounding or Direction Finding application using the RTL Library provided with the Bluetooth LE SDK.
For details about this release: The silabs.com SDK Release Notes page contains alphabetically-arranged release notes for all the SDKs in the Simplicity SDK Suite. Scroll down to Bluetooth Location Services and find the corresponding version link.
For Silicon Labs' Location Services product information: See the product pages on silabs.com for Channel Sounding and Direction Finding (AoA/AoD).
For background about both solutions: The fundamentals sections are good places to start. See Channel Sounding Fundamentals or Direction Finding Fundamentals.
To get started with development: See Channel Sounding Getting Started or Direction Finding Getting Started.
If you are already in development: Proceed to the Channel Sounding Developer's Guide or go directly to the API Reference. For Direction Finding, review the linked documents.