Developing with Silicon Labs Bluetooth Low Energy (LE)#
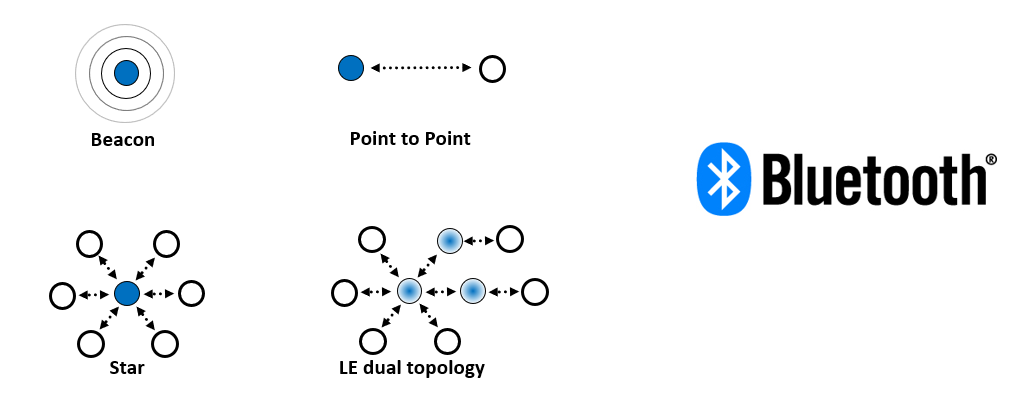
Bluetooth is a wireless technology standard managed by the Bluetooth Special Interest Group (SIG). Designed for data transfer and exchange over short distances, Bluetooth makes use of the unlicensed ISM band at 2.4 GHz. Traditional Bluetooth technology is optimized for sending a steady stream of high quality data in a power-efficient way. Bluetooth low energy technology allows for short bursts of long-range radio connections, making it ideal for applications that depend on long battery life and don’t need high throughput streaming data.
Silicon Labs has also developed a library specifically for Location Services.
The content on these pages is intended for those who want to experiment with or are already developing a Bluetooth LE application using Silicon Labs technology.
For details about this release: Links to release notes are available on the silabs.com SDK Release Notes page.
For Silicon Labs Bluetooth LE product information: See the product pages on silabs.com.
For background about the Bluetooth protocol: The Fundamentals section is a good place to start.
To get started with development: See the Getting Started section to get started working with example applications.
If you are already in development: See the Developer's Guide for details or go directly to the Stack API Reference Guide or Service API Reference Guide.
If you are using Bluetooth LE SDK version 2.x, see Transitioning from the v2.x to the v3.x Bluetooth SDK.