Pulse Width Modulation#
Introduction#
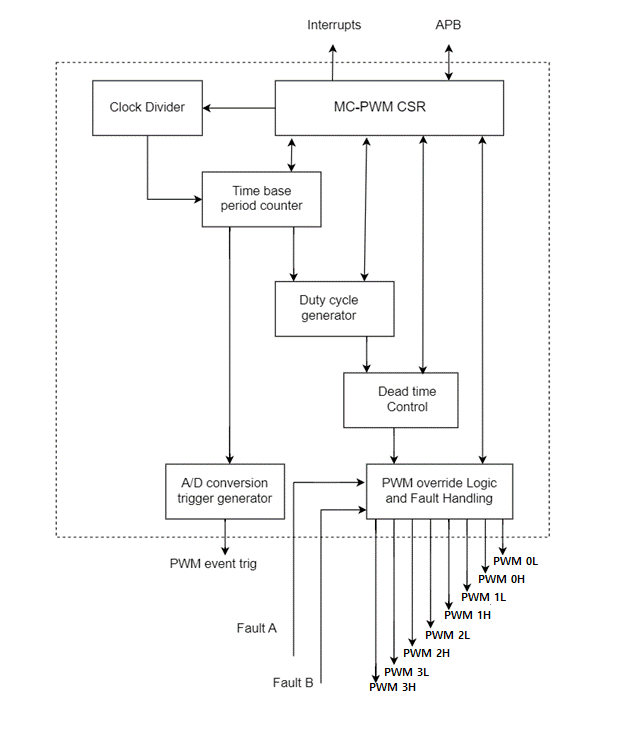
The Motor Control Pulse Width Modulation (MCPWM) controller is used to generate a periodic pulse waveform, essential for motor control and power control applications. The MCPWM controller functions as a timer to count up to a period count value. Both the time period and the duty cycle of the pulses are programmable.
Features of Pulse Width Modulation
Supports up to eight PWM outputs with four duty cycle generators.
Includes complementary and independent output modes.
Provides dead time insertion in complementary mode.
Allows manual override for PWM output pins, with programmable output pin polarity.
Supports interrupt generation for various events.
Includes two hardware fault input pins.
Features a special event trigger for synchronizing analog-to-digital conversions.
Configuration#
The configurable parameters of Pulse Width Modulation include frequency, mode, timer counter, duty cycle, and output polarity. The APIs used to manage these parameters are:
Set output polarity:sl_si91x_pwm_set_output_polarity
Set time period and counter initial value:sl_si91x_pwm_set_time_period
Set output mode:sl_si91x_pwm_set_output_mode
Get time period:sl_si91x_pwm_get_time_period
Select duty cycle for PWM:sl_si91x_pwm_set_duty_cycle
Set base timer mode:sl_si91x_pwm_set_base_timer_mode
Select number of base timers for four channels or one base timer for all channels:sl_si91x_pwm_control_base_timer
For more information on configuring available parameters, see the respective peripheral example readme document.
Usage#
The PWM driver generates a continuous ON/OFF digital signal with a 50% duty cycle at a frequency of 25 kHz, by default. Users can configure the duty cycle and frequency using the Universal Configurator (UC). Multiple instances of this component can be created as needed. By default, an instance of channel_0 is generated. The APIs used to set up PWM are:
Initialize the PWM:sl_si91x_pwm_init
Set configuration:sl_si91x_pwm_set_configuration
Time period control:sl_si91x_pwm_control_period
Duty cycle for PWM:sl_si91x_pwm_configure_duty_cycle
Interrupt flags of PWM:sl_si91x_pwm_register_callback
Start the PWM:sl_si91x_pwm_start
Stop the PWM:sl_si91x_pwm_stop
De-initialize the PWM:sl_si91x_pwm_deinit
Modules#
Enumerations#
Enum to control dead time.
Enum to control the duty cycle.
Enum to control output fault.
Enumeration for PWM channels (0-3).
Enumeration for PWM timer.
Enumeration for PWM polarity low.
Enumeration for PWM polarity high.
Enumeration for PWM base timer modes.
Enumeration for PWM output complementary pairs.
Enumeration for PWM special event trigger time base.
Enumeration for PWM time base output post scale bits.
Enumeration for PWM input clock pre-scale select value.
Enumeration for fault input override value.
Enumeration for output override control.
Enumeration for override value.
PWM enable external triggering.
Typedefs#
PWM structure.
PWM Special Event trigger configuration parameters structure.
PWM DeadTime configuration parameters structure.
PWM Callback structure.
Functions#
To de-initialize the PWM peripheral.
To get the API version of the PWM module.
To set the PWM configuration parameters.
To set output polarity for Motor Control Pulse Width Modulation (MCPWM).
To start the Motor Control Pulse Width Modulation (MCPWM).
To stop the Motor Control Pulse Width Modulation (MCPWM) operation for the required channel.
To select the number of base timers for MCPWM.
To set the time period and counter initial value for MCPWM.
To configure the special event trigger generation for MCPWM.
To configure dead time insertion parameters for MCPWM.
To reset the required channel of MCPWM.
To reset the counter of the required channel of MCPWM.
To set base time period control for MCPWM.
To control the fault A/B pin output value to be overridden when a fault condition occurs.
To set the mode of the base timer for the required channel.
To set the output mode for MCPWM.
To handle all interrupt flags of MCPWM.
To unregister the PWM event.
To read the counter current value for the required MCPWM channel.
To get the time period counter direction status of the required MCPWM channel.
To control dead time insertion at the rise edge or fall edge of any four channels.
To get the interrupt status of interrupt flags of MCPWM.
To control duty cycle parameters for the required MCPWM.
To control the output override operation of Motor Control Pulse Width Modulation (MCPWM).
To control the override control parameter and synchronize output with PWM time period.
To control the override value for the required output of MCPWM.
To control output fault in the PWM module.
To control the special event trigger.
To control the dead time for the required channel.
To select the duty cycle for the required MCPWM channel.
To get the duty cycle for the required MCPWM channel.
To enable an external trigger for the MCPWM.
To get the time period for the required MCPWM channel.
To initialize PWM pins and clock.
To initialize PWM event pins.
To disable the reset for the required channel of MCPWM.
To disable the counter reset for the required channel of MCPWM.
Enumeration Documentation#
sl_pwm_fault_t#
sl_pwm_fault_t
Enum to control fault A and fault B.
This enumeration defines the possible fault conditions for the PWM module. It includes fault A and fault B, which can be used to handle specific fault scenarios.
| Enumerator | |
|---|---|
| SL_FAULTA | PWM fault A. |
| SL_FAULTB | PWM fault B. |
| SL_FAULT_LAST | Last member of the enum for validation purposes. |
sl_pwm_dead_time_t#
sl_pwm_dead_time_t
Enum to control dead time.
This enumeration defines the possible states for controlling the dead time in the PWM module. It includes options to enable or disable the dead time.
| Enumerator | |
|---|---|
| SL_DEAD_TIME_DISABLE | PWM dead time disable. |
| SL_DEAD_TIME_ENABLE | PWM dead time enable. |
| SL_DEAD_TIME_LAST | Last member of the enum for validation. |
sl_pwm_duty_cycle_t#
sl_pwm_duty_cycle_t
Enum to control the duty cycle.
This enumeration defines the possible states for controlling the duty cycle in the PWM module. It includes options to enable or disable the duty cycle.
| Enumerator | |
|---|---|
| SL_DUTY_CYCLE_DISABLE | PWM duty cycle disable. |
| SL_DUTY_CYCLE_ENABLE | PWM duty cycle enable. |
| SL_DUTY_CYCLE_LAST | Last member of the enum for validation. |
sl_pwm_override_t#
sl_pwm_override_t
Enum to control override.
This enumeration defines the possible states for controlling the override in the PWM module. It includes options to reset or set the override.
| Enumerator | |
|---|---|
| SL_OVERRIDE_RESET | PWM override reset. |
| SL_OVERRIDE_SET | PWM override set. |
| SL_OVERRIDE_LAST | Last member of the enum for validation. |
sl_pwm_output_fault_t#
sl_pwm_output_fault_t
Enum to control output fault.
This enumeration defines the possible states for controlling the output fault in the PWM module. It includes options to reset or set the output fault.
| Enumerator | |
|---|---|
| SL_OUTPUT_FAULT_RESET | PWM output fault reset. |
| SL_OUTPUT_FAULT_SET | PWM output fault set. |
| SL_OUTPUT_FAULT_LAST | Last member of the enum for validation. |
sl_pwm_event_t#
sl_pwm_event_t
Enum to control events.
This enumeration defines the possible states for controlling events in the PWM module. It includes options to enable or disable events.
| Enumerator | |
|---|---|
| SL_EVENT_DISABLE | PWM event disable. |
| SL_EVENT_ENABLE | PWM event enable. |
| SL_EVENT_LAST | Last member of the enum for validation. |
sl_pwm_channel_t#
sl_pwm_channel_t
Enumeration for PWM channels (0-3).
This enumeration defines the available PWM channels. It includes channels 0 through 3.
| Enumerator | |
|---|---|
| SL_CHANNEL_1 | PWM channel 0. |
| SL_CHANNEL_2 | PWM channel 1. |
| SL_CHANNEL_3 | PWM channel 2. |
| SL_CHANNEL_4 | PWM channel 3. |
| SL_CHANNEL_LAST | Last member of the enum for validation. |
sl_pwm_timer_t#
sl_pwm_timer_t
Enumeration for PWM timer.
This enumeration defines the possible timer configurations for the PWM module. It includes options for using a separate timer for each channel or a single timer for all channels.
| Enumerator | |
|---|---|
| SL_BASE_TIMER_EACH_CHANNEL | PWM timer for each channel. |
| SL_BASE_TIMER_ALL_CHANNEL | PWM timer for all channels. |
| SL_BASE_TIMER_LAST | Last member of the enum for validation. |
sl_pwm_polarity_low_t#
sl_pwm_polarity_low_t
Enumeration for PWM polarity low.
This enumeration defines the possible states for controlling the polarity of the low side in the PWM module. It includes options for setting the polarity to low or high.
| Enumerator | |
|---|---|
| SL_POLARITYL_LOW | PWM output polarity for low side (L0-L3) - low. |
| SL_POLARITYL_HIGH | PWM output polarity for low side (H0-H3) - high. |
| SL_POLARITYL_LAST | Last member of the enum for validation. |
sl_pwm_polarity_high_t#
sl_pwm_polarity_high_t
Enumeration for PWM polarity high.
This enumeration defines the possible states for controlling the polarity of the high side in the PWM module. It includes options for setting the polarity to low or high.
| Enumerator | |
|---|---|
| SL_POLARITYH_LOW | PWM output polarity for high side (L0-L3) - low. |
| SL_POLARITYH_HIGH | PWM output polarity for high side (H0-H3) - high. |
| SL_POLARITYH_LAST | Last member of the enum for validation. |
sl_pwm_mode_t#
sl_pwm_mode_t
Enumeration for PWM mode.
This enumeration defines the possible modes for the PWM module. It includes options for independent and complementary modes.
| Enumerator | |
|---|---|
| SL_MODE_INDEPENDENT | PWM independent mode. |
| SL_MODE_COMPLEMENTARY | PWM complementary mode. |
| SL_MODE_LAST | Last member of the enum for validation. |
sl_pwm_base_timer_mode_t#
sl_pwm_base_timer_mode_t
Enumeration for PWM base timer modes.
This enumeration defines the possible modes for the PWM base timer. It includes options for free run, single event, down count, up/down, and up/down double update modes.
| Enumerator | |
|---|---|
| SL_FREE_RUN_MODE | PWM free run mode. |
| SL_SINGLE_EVENT_MODE | PWM single event mode. |
| SL_DOWN_COUNT_MODE | PWM down count mode. |
| SL_UP_DOWN_MODE | PWM up/down mode. |
| SL_UP_DOWN_DOUBLE_UPDATE | PWM up/down double update mode. |
| SL_BASE_TIMER_MODE_LAST | Last member of the enum for validation. |
sl_pwm_output_t#
sl_pwm_output_t
Enumeration for PWM output complementary pairs.
This enumeration defines the possible PWM output pairs. It includes options for low and high outputs.
| Enumerator | |
|---|---|
| SL_OUTPUT_LOW0 | PWM output L0. |
| SL_OUTPUT_LOW1 | PWM output L1. |
| SL_OUTPUT_LOW2 | PWM output L2. |
| SL_OUTPUT_LOW3 | PWM output L3. |
| SL_OUTPUT_HIGH0 | PWM output H0. |
| SL_OUTPUT_HIGH1 | PWM output H1. |
| SL_OUTPUT_HIGH2 | PWM output H2. |
| SL_OUTPUT_HIGH3 | PWM output H3. |
| SL_OUTPUT_LAST | Last member of the enum for validation. |
sl_pwm_svt_t#
sl_pwm_svt_t
Enumeration for PWM special event trigger time base.
This enumeration defines the possible states for the special event trigger in the PWM module. It includes options for triggering when the time base is counting up or down.
| Enumerator | |
|---|---|
| SL_SVT_COUNT_UP | Special event trigger occurs when the time base is counting up. |
| SL_SVT_COUNT_DOWN | Special event trigger occurs when the time base is counting down. |
| SL_SVT_COUNT_LAST | Last member of the enum for validation. |
sl_pwm_post_t#
sl_pwm_post_t
Enumeration for PWM time base output post scale bits.
This enumeration defines the possible post scale values for the PWM time base output. It includes options ranging from 1:1 to 1:16 post scale.
| Enumerator | |
|---|---|
| SL_TIME_PERIOD_POSTSCALE_1_1 | 1:1 post scale |
| SL_TIME_PERIOD_POSTSCALE_1_2 | 1:2 post scale |
| SL_TIME_PERIOD_POSTSCALE_1_3 | 1:3 post scale |
| SL_TIME_PERIOD_POSTSCALE_1_4 | 1:4 post scale |
| SL_TIME_PERIOD_POSTSCALE_1_5 | 1:5 post scale |
| SL_TIME_PERIOD_POSTSCALE_1_6 | 1:6 post scale |
| SL_TIME_PERIOD_POSTSCALE_1_7 | 1:7 post scale |
| SL_TIME_PERIOD_POSTSCALE_1_8 | 1:8 post scale |
| SL_TIME_PERIOD_POSTSCALE_1_9 | 1:9 post scale |
| SL_TIME_PERIOD_POSTSCALE_1_10 | 1:10 post scale |
| SL_TIME_PERIOD_POSTSCALE_1_11 | 1:11 post scale |
| SL_TIME_PERIOD_POSTSCALE_1_12 | 1:12 post scale |
| SL_TIME_PERIOD_POSTSCALE_1_13 | 1:13 post scale |
| SL_TIME_PERIOD_POSTSCALE_1_14 | 1:14 post scale |
| SL_TIME_PERIOD_POSTSCALE_1_15 | 1:15 post scale |
| SL_TIME_PERIOD_POSTSCALE_1_16 | 1:16 post scale |
| SL_TIME_PERIOD_POSTSCALE_1_LAST | Last member of the enum for validation. |
sl_pwm_pre_t#
sl_pwm_pre_t
Enumeration for PWM input clock pre-scale select value.
This enumeration defines the possible pre-scale values for the PWM input clock. It includes options ranging from 1x to 64x input clock periods.
| Enumerator | |
|---|---|
| SL_TIME_PERIOD_PRESCALE_1 | 1x input clock period |
| SL_TIME_PERIOD_PRESCALE_2 | 2x input clock period |
| SL_TIME_PERIOD_PRESCALE_4 | 4x input clock period |
| SL_TIME_PERIOD_PRESCALE_8 | 8x input clock period |
| SL_TIME_PERIOD_PRESCALE_16 | 16x input clock period |
| SL_TIME_PERIOD_PRESCALE_32 | 32x input clock period |
| SL_TIME_PERIOD_PRESCALE_64 | 64x input clock period |
| SL_TIME_PERIOD_PRESCALE_LAST | Last member of the enum for validation. |
sl_pwm_fault_input_t#
sl_pwm_fault_input_t
Enumeration for fault input override value.
This enumeration defines the possible override values for the PWM output pin when an external fault input A/B event occurs.
| Enumerator | |
|---|---|
| SL_VALUE_INACTIVE | PWM output pin is driven inactive on an external fault input A/B event. |
| SL_VALUE_ACTIVE | PWM output pin is driven active on an external fault input A/B event. |
| SL_VALUE_LAST | Last member of the enum for validation. |
sl_pwm_output_override_t#
sl_pwm_output_override_t
Enumeration for output override control.
This enumeration defines the possible states for the output override control in the PWM module. It includes options for unsynchronized and synchronized output override, depending on the operating mode.
| Enumerator | |
|---|---|
| SL_OP_OVERRIDE_UNSYNC | No effect. |
| SL_OP_OVERRIDE_SYNC | Output override is in sync with the PWM time period, depending on the operating mode. |
| SL_OP_OVERRIDE_LAST | Last member of the enum for validation. |
sl_pwm_override_value_t#
sl_pwm_override_value_t
Enumeration for override value.
This enumeration defines the possible override values for the PWM module.
| Enumerator | |
|---|---|
| SL_OVERRIDE_VALUE0 | Override value 0. |
| SL_OVERRIDE_VALUE1 | Override value 1. |
| SL_OVERRIDE_VALUE_LAST | Last member of enum for validation. |
sl_pwm_trigger_t#
sl_pwm_trigger_t
PWM enable external triggering.
This enumeration defines the possible states for enabling or disabling external triggering in the PWM module. It includes options for disabling and enabling external triggering, as well as a last member for validation.
| Enumerator | |
|---|---|
| SL_TRIGGER_DISABLE | Disables external triggering. |
| SL_TRIGGER_ENABLE | Enables external triggering. |
| SL_TRIGGER_LAST | Last member of the enum for validation. |
Typedef Documentation#
sl_si91x_pwm_svt_config_t#
typedef RSI_MCPWM_SVT_CONFIG_T sl_si91x_pwm_svt_config_t
PWM Special Event trigger configuration parameters structure.
sl_si91x_pwm_dt_config_t#
typedef RSI_MCPWM_DT_CONFIG_T sl_si91x_pwm_dt_config_t
PWM DeadTime configuration parameters structure.
sl_si91x_pwm_callback_t#
typedef RSI_MCPWM_CALLBACK_T sl_si91x_pwm_callback_t
PWM Callback structure.
Function Documentation#
sl_si91x_pwm_deinit#
void sl_si91x_pwm_deinit (void )
To de-initialize the PWM peripheral.
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| void | N/A |
This API is used to de-initialize the PWM peripheral and disable the PWM module clock.
Pre-conditions:
sl_si91x_pwm_init must be called before this function.
sl_si91x_pwm_set_configuration must be called before this function.
sl_si91x_pwm_get_version#
sl_pwm_version_t sl_si91x_pwm_get_version (void )
To get the API version of the PWM module.
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| void | N/A |
This API retrieves the version information of the PWM module, which includes the release, SQA, and DEV version numbers.
Returns
Returns a structure of type sl_pwm_version_t.
sl_si91x_pwm_set_configuration#
sl_status_t sl_si91x_pwm_set_configuration (sl_pwm_config_t * pwm_config)
To set the PWM configuration parameters.
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| sl_pwm_config_t * | [in] | pwm_config | Pointer to configuration parameters of type sl_pwm_config_t. |
This API configures the output polarity and sets the time period, output mode, duty cycle, base timer mode, and base timer selection for each channel.
Pre-condition:
sl_si91x_pwm_init must be called before this function.
Returns
sl_status_t Status code indicating the result:
SL_STATUS_OK (0x0000) - Success.
SL_STATUS_INVALID_PARAMETER (0x0021) - The parameter is an invalid argument.
SL_STATUS_NULL_POINTER (0x0022) - The parameter is a null pointer.
For more information on status codes, see SL STATUS DOCUMENTATION.
sl_si91x_pwm_set_output_polarity#
sl_status_t sl_si91x_pwm_set_output_polarity (boolean_t polarity_low, boolean_t polarity_high)
To set output polarity for Motor Control Pulse Width Modulation (MCPWM).
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| boolean_t | [in] | polarity_low | Output polarity for the low side (L3, L2, L1, L0). |
| boolean_t | [in] | polarity_high | Output polarity for the high side (H3, H2, H1, H0). |
Setting polarity to positive sets the digital pulse ON for the duty cycle and OFF for the remainder of the period. Setting polarity to negative is the vice-versa of positive polarity set.
Pre-condition:
sl_si91x_pwm_init must be called before this function.
Returns
sl_status_t Status code indicating the result:
SL_STATUS_OK (0x0000) - Success.
SL_STATUS_INVALID_PARAMETER (0x0021) - The parameter is an invalid argument.
SL_STATUS_NULL_POINTER (0x0022) - The parameter is a null pointer.
For more information on status codes, see SL STATUS DOCUMENTATION.
sl_si91x_pwm_start#
sl_status_t sl_si91x_pwm_start (sl_pwm_channel_t channel)
To start the Motor Control Pulse Width Modulation (MCPWM).
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| sl_pwm_channel_t | [in] | channel | Channel number (0 to 3) of type sl_pwm_channel_t. |
Operation for the required channel is based on the duty cycle set, polarity, and all other configurations done for respective channels.
Pre-conditions:
Returns
sl_status_t Status code indicating the result:
SL_STATUS_OK (0x0000) - Success.
SL_STATUS_INVALID_PARAMETER (0x0021) - The parameter is an invalid argument.
SL_STATUS_NULL_POINTER (0x0022) - The parameter is a null pointer.
For more information on status codes, see SL STATUS DOCUMENTATION.
sl_si91x_pwm_stop#
sl_status_t sl_si91x_pwm_stop (sl_pwm_channel_t channel)
To stop the Motor Control Pulse Width Modulation (MCPWM) operation for the required channel.
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| sl_pwm_channel_t | [in] | channel | Channel number (0 to 3) of type sl_pwm_channel_t. |
This API is used to stop the Motor Control Pulse Width Modulation (MCPWM) operation for the required channel.
Pre-conditions:
Returns
sl_status_t Status code indicating the result:
SL_STATUS_OK (0x0000) - Success.
SL_STATUS_INVALID_PARAMETER (0x0021) - The parameter is an invalid argument.
SL_STATUS_NULL_POINTER (0x0022) - The parameter is a null pointer.
For more information on status codes, see SL STATUS DOCUMENTATION.
sl_si91x_pwm_control_base_timer#
sl_status_t sl_si91x_pwm_control_base_timer (sl_pwm_timer_t base_timer)
To select the number of base timers for MCPWM.
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| sl_pwm_timer_t | [in] | base_timer | PWM base timer of type sl_pwm_timer_t. |
This API is used to select the number of base timers as four base timers for four channels or one base timer for all channels of Motor Control Pulse Width Modulation (MCPWM). One base timer is used when a single timer is to be selected for all channels. Instead of only one base timer, there is also one base timer for each channel selection, where separate base timers are used for separate channels.
Pre-conditions:
Returns
sl_status_t Status code indicating the result:
SL_STATUS_OK (0x0000) - Success.
SL_STATUS_INVALID_PARAMETER (0x0021) - The parameter is an invalid argument.
SL_STATUS_NULL_POINTER (0x0022) - The parameter is a null pointer.
For more information on status codes, see SL STATUS DOCUMENTATION.
sl_si91x_pwm_set_time_period#
sl_status_t sl_si91x_pwm_set_time_period (sl_pwm_channel_t channel, uint32_t period, uint32_t init_val)
To set the time period and counter initial value for MCPWM.
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| sl_pwm_channel_t | [in] | channel | Channel number (0 to 3) of type sl_pwm_channel_t. |
| uint32_t | [in] | period | Time period value in the range of 0 - 65535. |
| uint32_t | [in] | init_val | Update the base time counter initial value, in the range of 0 - 65535. |
This API is used to set the time period and counter initial value for the required Motor Control Pulse Width Modulation (MCPWM) channel. It updates the base timer period and base timer counter initial values for the required channel.
Pre-conditions:
Returns
sl_status_t Status code indicating the result:
SL_STATUS_OK (0x0000) - Success.
SL_STATUS_INVALID_PARAMETER (0x0021) - The parameter is an invalid argument.
SL_STATUS_NULL_POINTER (0x0022) - The parameter is a null pointer.
For more information on status codes, see SL STATUS DOCUMENTATION.
sl_si91x_pwm_trigger_special_event#
sl_status_t sl_si91x_pwm_trigger_special_event (sl_pwm_svt_t direction, sl_si91x_pwm_svt_config_t * pwm_config)
To configure the special event trigger generation for MCPWM.
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| sl_pwm_svt_t | [in] | direction | Special event trigger for time base direction of type sl_pwm_svt_t. |
| sl_si91x_pwm_svt_config_t * | [in] | pwm_config | Pointer to the structure of type sl_si91x_pwm_svt_config_t. |
This API is used to configure special event trigger generation for the required Motor Control Pulse Width Modulation (MCPWM) channel, which allows the A/D converter to be synchronized to the PWM time base.
Pre-conditions:
Returns
sl_status_t Status code indicating the result:
SL_STATUS_OK (0x0000) - Success.
SL_STATUS_INVALID_PARAMETER (0x0021) - The parameter is an invalid argument.
SL_STATUS_NULL_POINTER (0x0022) - The parameter is a null pointer.
For more information on status codes, see SL STATUS DOCUMENTATION.
sl_si91x_pwm_configure_dead_time#
sl_status_t sl_si91x_pwm_configure_dead_time (sl_si91x_pwm_dt_config_t * dead_time, sl_pwm_channel_t channel)
To configure dead time insertion parameters for MCPWM.
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| sl_si91x_pwm_dt_config_t * | [in] | dead_time | Pointer to the structure of type sl_si91x_pwm_dt_config_t. |
| sl_pwm_channel_t | [in] | channel | Channel number (0 to 3) of type sl_pwm_channel_t. |
This API is used to configure dead time insertion parameters for Motor Control Pulse Width Modulation (MCPWM). Dead time is a small amount of time inserted between the switching edges of PWM signals.
Pre-conditions:
Returns
sl_status_t Status code indicating the result:
SL_STATUS_OK (0x0000) - Success.
SL_STATUS_INVALID_PARAMETER (0x0021) - The parameter is an invalid argument.
SL_STATUS_NULL_POINTER (0x0022) - The parameter is a null pointer.
For more information on status codes, see SL STATUS DOCUMENTATION.
sl_si91x_pwm_reset_channel#
sl_status_t sl_si91x_pwm_reset_channel (sl_pwm_channel_t channel)
To reset the required channel of MCPWM.
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| sl_pwm_channel_t | [in] | channel | Channel number (0 to 3) of type sl_pwm_channel_t. |
The API is used to reset the required channel of Motor Control Pulse Width Modulation (MCPWM).
Pre-conditions:
Returns
sl_status_t Status code indicating the result:
SL_STATUS_OK (0x0000) - Success.
SL_STATUS_INVALID_PARAMETER (0x0021) - The parameter is an invalid argument.
SL_STATUS_NULL_POINTER (0x0022) - The parameter is a null pointer.
For more information on status codes, see SL STATUS DOCUMENTATION.
sl_si91x_pwm_reset_counter#
sl_status_t sl_si91x_pwm_reset_counter (sl_pwm_channel_t channel)
To reset the counter of the required channel of MCPWM.
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| sl_pwm_channel_t | [in] | channel | Channel number (0 to 3) of type sl_pwm_channel_t. |
This API is used to reset the counter of the required channel of Motor Control Pulse Width Modulation (MCPWM).
Pre-conditions:
Returns
sl_status_t Status code indicating the result:
SL_STATUS_OK (0x0000) - Success.
SL_STATUS_INVALID_PARAMETER (0x0021) - The parameter is an invalid argument.
SL_STATUS_NULL_POINTER (0x0022) - The parameter is a null pointer.
For more information on status codes, see SL STATUS DOCUMENTATION.
sl_si91x_pwm_control_period#
sl_status_t sl_si91x_pwm_control_period (sl_pwm_post_t post_scale, sl_pwm_pre_t pre_scale, sl_pwm_channel_t channel)
To set base time period control for MCPWM.
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| sl_pwm_post_t | [in] | post_scale | Time base output post scale bits of type sl_pwm_post_t. |
| sl_pwm_pre_t | [in] | pre_scale | Base timer input clock pre scale select value of type sl_pwm_pre_t. |
| sl_pwm_channel_t | [in] | channel | Channel number (0 to 3) of type sl_pwm_channel_t. |
The API is used to set base time period control for the required Motor Control Pulse Width Modulation (MCPWM) channel. This sets the base timer output post scalar bits and base timer input clock prescalar value.
Returns
sl_status_t Status code indicating the result:
SL_STATUS_OK (0x0000) - Success.
SL_STATUS_INVALID_PARAMETER (0x0021) - The parameter is an invalid argument.
SL_STATUS_NULL_POINTER (0x0022) - The parameter is a null pointer.
For more information on status codes, see SL STATUS DOCUMENTATION.
sl_si91x_pwm_control_fault#
sl_status_t sl_si91x_pwm_control_fault (sl_pwm_fault_t fault, sl_pwm_output_t pwm_output, sl_pwm_override_value_t value)
To control the fault A/B pin output value to be overridden when a fault condition occurs.
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| sl_pwm_fault_t | [in] | fault | Enum of type sl_pwm_fault_t. |
| sl_pwm_output_t | [in] | pwm_output | Enum of type sl_pwm_output_t. |
| sl_pwm_override_value_t | [in] | value | Fault input A/B PWM output override value of type sl_pwm_override_value_t. |
The API is used to control the output value of the Fault A/B pins to override their default behavior when a fault condition occurs. When asserted, these pins can optionally drive each PWM I/O pin to a specified state.
Pre-conditions:
Returns
sl_status_t Status code indicating the result:
SL_STATUS_OK (0x0000) - Success.
SL_STATUS_INVALID_PARAMETER (0x0021) - The parameter is an invalid argument.
SL_STATUS_NULL_POINTER (0x0022) - The parameter is a null pointer.
For more information on status codes, see SL STATUS DOCUMENTATION.
sl_si91x_pwm_set_base_timer_mode#
sl_status_t sl_si91x_pwm_set_base_timer_mode (sl_pwm_base_timer_mode_t mode, sl_pwm_channel_t channel)
To set the mode of the base timer for the required channel.
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| sl_pwm_base_timer_mode_t | [in] | mode | Base timer operating mode of type sl_pwm_base_timer_mode_t. |
| sl_pwm_channel_t | [in] | channel | Channel number (0 to 3) of type sl_pwm_channel_t. |
This API is used to set the mode of the base timer for the specified channel. It supports various modes, such as free-running mode, single-event mode, down count mode, up/down mode, and up/down mode with interrupts for double PWM updates.
Pre-conditions:
Returns
sl_status_t Status code indicating the result:
SL_STATUS_OK (0x0000) - Success.
SL_STATUS_INVALID_PARAMETER (0x0021) - The parameter is an invalid argument.
SL_STATUS_NULL_POINTER (0x0022) - The parameter is a null pointer.
For more information on status codes, see SL STATUS DOCUMENTATION.
sl_si91x_pwm_set_output_mode#
sl_status_t sl_si91x_pwm_set_output_mode (sl_pwm_mode_t mode, sl_pwm_channel_t channel)
To set the output mode for MCPWM.
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| sl_pwm_mode_t | [in] | mode | PWM output mode of type sl_pwm_mode_t. |
| sl_pwm_channel_t | [in] | channel | Channel number (0 to 3) of type sl_pwm_channel_t. |
This API is used to set the output mode for the Motor Control Pulse Width Modulation (MCPWM). There are two modes that can be configured: independent mode or complementary mode.
Pre-conditions:
Returns
sl_status_t Status code indicating the result:
SL_STATUS_OK (0x0000) - Success.
SL_STATUS_INVALID_PARAMETER (0x0021) - The parameter is an invalid argument.
SL_STATUS_NULL_POINTER (0x0022) - The parameter is a null pointer.
For more information on status codes, see SL STATUS DOCUMENTATION.
sl_si91x_pwm_register_callback#
sl_status_t sl_si91x_pwm_register_callback (sl_si91x_pwm_callback_t * callback_event, uint16_t flag)
To handle all interrupt flags of MCPWM.
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| sl_si91x_pwm_callback_t * | [in] | callback_event | Structure of type sl_si91x_pwm_callback_t. |
| uint16_t | [in] | flag | It is the logical OR of different interrupts generated on multiple channels (in the range of 0 - 65535). |
This API is used to handle all interrupt flags of Motor Control Pulse Width Modulation (MCPWM). It manages the IRQ handler, timer interrupt, and callback events for different events.
Pre-conditions:
Returns
sl_status_t Status code indicating the result:
SL_STATUS_OK (0x0000) - Success.
SL_STATUS_NULL_POINTER (0x0022) - The parameter is a null pointer.
For more information on status codes, see SL STATUS DOCUMENTATION.
sl_si91x_pwm_unregister_callback#
sl_status_t sl_si91x_pwm_unregister_callback (uint16_t flag)
To unregister the PWM event.
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| uint16_t | [in] | flag | It is the logical OR of different interrupts generated on multiple channels (in the range of 0 - 65535). |
This API is used to unregister the PWM event, disabling the callback for the specified interrupt flags.
Pre-conditions:
Returns
sl_status_t Status code indicating the result:
SL_STATUS_OK (0x0000) - Success.
SL_STATUS_NULL_POINTER (0x0022) - The parameter is a null pointer.
For more information on status codes, see SL STATUS DOCUMENTATION.
sl_si91x_pwm_read_counter#
sl_status_t sl_si91x_pwm_read_counter (uint16_t * counter_value, sl_pwm_channel_t channel)
To read the counter current value for the required MCPWM channel.
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| uint16_t * | [out] | counter_value | Pointer to store the counter value. |
| sl_pwm_channel_t | [in] | channel | Channel number (0 to 3) of type sl_pwm_channel_t. |
This API is used to read the counter current value for the required Motor Control Pulse Width Modulation (MCPWM) channel.
Pre-conditions:
Returns
sl_status_t Status code indicating the result:
SL_STATUS_OK (0x0000) - Success.
SL_STATUS_INVALID_PARAMETER (0x0021) - The parameter is an invalid argument.
SL_STATUS_NULL_POINTER (0x0022) - The parameter is a null pointer.
For more information on status codes, see SL STATUS DOCUMENTATION.
sl_si91x_pwm_get_counter_direction#
sl_status_t sl_si91x_pwm_get_counter_direction (uint8_t * counter_direction, sl_pwm_channel_t channel)
To get the time period counter direction status of the required MCPWM channel.
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| uint8_t * | [out] | counter_direction | Pointer to the counter direction (up/down) of type uint8_t. |
| sl_pwm_channel_t | [in] | channel | Channel number (0 to 3) of type sl_pwm_channel_t. |
This API is used to get the time period counter direction status of the required Motor Control Pulse Width Modulation (MCPWM) channel, indicating whether the counter is counting up or down.
Pre-conditions:
Returns
sl_status_t Status code indicating the result:
SL_STATUS_OK (0x0000) - Success.
SL_STATUS_INVALID_PARAMETER (0x0021) - The parameter is an invalid argument.
SL_STATUS_NULL_POINTER (0x0022) - The parameter is a null pointer.
For more information on status codes, see SL STATUS DOCUMENTATION.
sl_si91x_pwm_control_dead_time#
sl_status_t sl_si91x_pwm_control_dead_time (sl_pwm_dead_time_t dead_time, uint32_t flag)
To control dead time insertion at the rise edge or fall edge of any four channels.
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| sl_pwm_dead_time_t | [in] | dead_time | Enum of type sl_pwm_dead_time_t. |
| uint32_t | [in] | flag | ORing of the following values (in the range of 0 - 65535):
|
This API is used to control dead time insertion at the rise edge or fall edge of any four channels. Dead time applies only to PWM output pairs that are in complementary mode.
Returns
sl_status_t Status code indicating the result:
SL_STATUS_OK (0x0000) - Success.
SL_STATUS_INVALID_PARAMETER (0x0021) - The parameter is an invalid argument.
SL_STATUS_NULL_POINTER (0x0022) - The parameter is a null pointer.
For more information on status codes, see SL STATUS DOCUMENTATION.
sl_si91x_pwm_get_interrupt_status#
sl_status_t sl_si91x_pwm_get_interrupt_status (uint32_t flag, uint16_t * intr_status)
To get the interrupt status of interrupt flags of MCPWM.
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| uint32_t | [in] | flag | Flag value (0 - 65535). |
| uint16_t * | [out] | intr_status | Pointer to interrupt status. |
The API is used to get the interrupt status of interrupt flags of Motor Control Pulse Width Modulation (MCPWM). Events which are raised can be identified by checking the status.
Pre-conditions:
Returns
sl_status_t Status code indicating the result:
SL_STATUS_OK (0x0000) - Success
SL_STATUS_INVALID_PARAMETER (0x0021) - The parameter is an invalid argument
SL_STATUS_NULL_POINTER (0x0022) - The parameter is a null pointer
For more information on status codes, see SL STATUS DOCUMENTATION.
sl_si91x_pwm_configure_duty_cycle#
sl_status_t sl_si91x_pwm_configure_duty_cycle (sl_pwm_duty_cycle_t duty_cycle, uint32_t value, sl_pwm_channel_t channel)
To control duty cycle parameters for the required MCPWM.
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| sl_pwm_duty_cycle_t | [in] | duty_cycle | Enum of type sl_pwm_duty_cycle_t. |
| uint32_t | [in] | value | This can be a logical OR of the following parameters (Range 0 - 127):
|
| sl_pwm_channel_t | [in] | channel | Channel number (0 to 3) of type sl_pwm_channel_t. |
This API controls the duty cycle (0% to 100% and vice versa) parameters by enabling or disabling the specified channel for the required Motor Control Pulse Width Modulation (MCPWM) channel. It can also enable (or prevent) duty cycle updating.
Returns
sl_status_t Status code indicating the result:
SL_STATUS_OK (0x0000) - Success.
SL_STATUS_INVALID_PARAMETER (0x0021) - The parameter is an invalid argument.
SL_STATUS_NULL_POINTER (0x0022) - The parameter is a null pointer.
For more information on status codes, see SL STATUS DOCUMENTATION.
sl_si91x_pwm_output_override#
sl_status_t sl_si91x_pwm_output_override (sl_pwm_override_t override, sl_pwm_output_t pwm_output)
To control the output override operation of Motor Control Pulse Width Modulation (MCPWM).
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| sl_pwm_override_t | [in] | override | Enum of type sl_pwm_override_t. |
| sl_pwm_output_t | [in] | pwm_output | PWM output override of type sl_pwm_output_t. |
This API is used to control MCPWM's output override operation. It enables you to enable or disable PWM output override.
Returns
sl_status_t Status code indicating the result:
SL_STATUS_OK (0x0000) - Success.
SL_STATUS_INVALID_PARAMETER (0x0021) - The parameter is an invalid argument.
SL_STATUS_NULL_POINTER (0x0022) - The parameter is a null pointer.
For more information on status codes, see SL STATUS DOCUMENTATION.
sl_si91x_pwm_control_override#
sl_status_t sl_si91x_pwm_control_override (sl_pwm_override_t override, sl_pwm_output_override_t value)
To control the override control parameter and synchronize output with PWM time period.
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| sl_pwm_override_t | [in] | override | Enum of type sl_pwm_override_t. |
| sl_pwm_output_override_t | [in] | value | Output override to be in sync with PWM time period of type sl_pwm_output_override_t. |
This API is used for controlling the override control parameters and synchronizing the output with the PWM time period, depending on the operating mode.
Returns
sl_status_t Status code indicating the result:
SL_STATUS_OK (0x0000) - Success.
SL_STATUS_INVALID_PARAMETER (0x0021) - The parameter is an invalid argument.
SL_STATUS_NULL_POINTER (0x0022) - The parameter is a null pointer.
For more information on status codes, see SL STATUS DOCUMENTATION.
sl_si91x_pwm_control_override_value#
sl_status_t sl_si91x_pwm_control_override_value (sl_pwm_override_t override, sl_pwm_output_t pwm_output, sl_pwm_override_value_t value)
To control the override value for the required output of MCPWM.
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| sl_pwm_override_t | [in] | override | Enum of type sl_pwm_override_t. |
| sl_pwm_output_t | [in] | pwm_output | PWM output override of type sl_pwm_output_t. |
| sl_pwm_override_value_t | [in] | value | Override value of type sl_pwm_override_value_t. |
This API is used to control the override value for the required output of Motor Control Pulse Width Modulation (MCPWM).
Returns
sl_status_t Status code indicating the result:
SL_STATUS_OK (0x0000) - Success.
SL_STATUS_INVALID_PARAMETER (0x0021) - The parameter is an invalid argument.
SL_STATUS_NULL_POINTER (0x0022) - The parameter is a null pointer.
For more information on status codes, see SL STATUS DOCUMENTATION.
sl_si91x_pwm_control_output_fault#
sl_status_t sl_si91x_pwm_control_output_fault (sl_pwm_output_fault_t output_fault, uint32_t value)
To control output fault in the PWM module.
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| sl_pwm_output_fault_t | [in] | output_fault | Enum of type sl_pwm_output_fault_t. |
| uint32_t | [in] | value | This can be a logical OR of the below parameters (in the range of 0 - 65535):
|
This API is used to control output fault in PWM override control parameters for the required PWM output.
Pre-conditions:
Returns
sl_status_t Status code indicating the result:
SL_STATUS_OK (0x0000) - Success.
SL_STATUS_NULL_POINTER (0x0022) - The parameter is a null pointer.
For more information on status codes, see SL STATUS DOCUMENTATION.
sl_si91x_pwm_control_special_event_trigger#
sl_status_t sl_si91x_pwm_control_special_event_trigger (sl_pwm_event_t event)
To control the special event trigger.
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| sl_pwm_event_t | [in] | event | Enum of type sl_pwm_event_t. |
This API controls the generation of a special event trigger for the required channel of the Motor Control Pulse Width Modulation (MCPWM).
Returns
sl_status_t Status code indicating the result:
SL_STATUS_OK (0x0000) - Success.
SL_STATUS_NULL_POINTER (0x0022) - The parameter is a null pointer.
For more information on status codes, see SL STATUS DOCUMENTATION.
sl_si91x_pwm_select_dead_time#
sl_status_t sl_si91x_pwm_select_dead_time (sl_pwm_dead_time_t dead_time, uint32_t value)
To control the dead time for the required channel.
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| sl_pwm_dead_time_t | [in] | dead_time | Enum of type sl_pwm_dead_time_t. |
| uint32_t | [in] | value | This can be a logical OR of the below parameters (in the range of 0 - 4095):
|
This API is used to control dead time parameters for the required channel of the Motor Control Pulse Width Modulation (MCPWM).
Returns
sl_status_t Status code indicating the result:
SL_STATUS_OK (0x0000) - Success.
SL_STATUS_NULL_POINTER (0x0022) - The parameter is a null pointer.
For more information on status codes, see SL STATUS DOCUMENTATION.
sl_si91x_pwm_set_duty_cycle#
sl_status_t sl_si91x_pwm_set_duty_cycle (uint32_t duty_cycle, sl_pwm_channel_t channel)
To select the duty cycle for the required MCPWM channel.
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| uint32_t | [in] | duty_cycle | Duty cycle value (0 - 65535). |
| sl_pwm_channel_t | [in] | channel | Channel number (0 to 3) of type sl_pwm_channel_t. |
This API is used to select the duty cycle for the required Motor Control Pulse Width Modulation (MCPWM) channel.
Pre-conditions:
Returns
sl_status_t Status code indicating the result:
SL_STATUS_OK (0x0000) - Success.
SL_STATUS_INVALID_PARAMETER (0x0021) - The parameter is an invalid argument.
SL_STATUS_NULL_POINTER (0x0022) - The parameter is a null pointer.
For more information on status codes, see SL STATUS DOCUMENTATION.
sl_si91x_pwm_get_duty_cycle#
sl_status_t sl_si91x_pwm_get_duty_cycle (sl_pwm_channel_t channel, uint32_t * duty_cycle)
To get the duty cycle for the required MCPWM channel.
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| sl_pwm_channel_t | [in] | channel | Channel number (0 to 3) of type sl_pwm_channel_t. |
| uint32_t * | [out] | duty_cycle | Pointer to the duty cycle value. |
This API is used to get the duty cycle for the required Motor Control Pulse Width Modulation (MCPWM) channel.
Pre-conditions:
Returns
sl_status_t Status code indicating the result:
SL_STATUS_OK (0x0000) - Success.
SL_STATUS_INVALID_PARAMETER (0x0021) - The parameter is an invalid argument.
SL_STATUS_NULL_POINTER (0x0022) - The parameter is a null pointer.
For more information on status codes, see SL STATUS DOCUMENTATION.
sl_si91x_pwm_enable_external_trigger#
sl_status_t sl_si91x_pwm_enable_external_trigger (sl_pwm_trigger_t enable)
To enable an external trigger for the MCPWM.
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| sl_pwm_trigger_t | [in] | enable | Controlling external trigger of type sl_pwm_trigger_t. |
This API is used to enable the use of an external trigger for the base time counter increment or decrement of Motor Control Pulse Width Modulation (MCPWM).
Returns
sl_status_t Status code indicating the result:
SL_STATUS_OK (0x0000) - Success.
SL_STATUS_INVALID_PARAMETER (0x0021) - The parameter is an invalid argument.
SL_STATUS_NULL_POINTER (0x0022) - The parameter is a null pointer.
For more information on status codes, see SL STATUS DOCUMENTATION.
sl_si91x_pwm_get_time_period#
sl_status_t sl_si91x_pwm_get_time_period (sl_pwm_channel_t channel, uint16_t * time_period)
To get the time period for the required MCPWM channel.
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| sl_pwm_channel_t | [in] | channel | Channel number (0 to 3) of type sl_pwm_channel_t. |
| uint16_t * | [out] | time_period | Pointer to read the time period. |
This API is used to get the time period for the required Motor Control Pulse Width Modulation (MCPWM) channel.
Pre-conditions:
Returns
sl_status_t Status code indicating the result:
SL_STATUS_OK (0x0000) - Success.
SL_STATUS_INVALID_PARAMETER (0x0021) - The parameter is an invalid argument.
SL_STATUS_NULL_POINTER (0x0022) - The parameter is a null pointer.
For more information on status codes, see SL STATUS DOCUMENTATION.
sl_si91x_pwm_init#
sl_status_t sl_si91x_pwm_init (sl_pwm_init_t * pwm_init)
To initialize PWM pins and clock.
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| sl_pwm_init_t * | [in] | pwm_init | Pointer to the structure of type sl_pwm_init_t. |
This API initializes the PWM pins and clock for the Motor Control Pulse Width Modulation (MCPWM) module.
Returns
sl_status_t Status code indicating the result:
SL_STATUS_OK (0x0000) - Success.
SL_STATUS_NULL_POINTER (0x0022) - The parameter is a null pointer.
For more information on status codes, see SL STATUS DOCUMENTATION.
sl_si91x_pwm_fault_init#
sl_status_t sl_si91x_pwm_fault_init (sl_pwm_fault_init_t * pwm_fault)
To initialize PWM event pins.
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| sl_pwm_fault_init_t * | [in] | pwm_fault | Pointer to the structure of type sl_pwm_fault_init_t. |
This API initializes the PWM event pins for the Motor Control Pulse Width Modulation (MCPWM) module.
Returns
sl_status_t Status code indicating the result:
SL_STATUS_OK (0x0000) - Success.
SL_STATUS_NULL_POINTER (0x0022) - The parameter is a null pointer.
For more information on status codes, see SL STATUS DOCUMENTATION.
sl_si91x_pwm_reset_channel_disable#
sl_status_t sl_si91x_pwm_reset_channel_disable (sl_pwm_channel_t channel)
To disable the reset for the required channel of MCPWM.
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| sl_pwm_channel_t | [in] | channel | Channel number (0 to 3) of type sl_pwm_channel_t. |
This API is used to disable the reset for the required channel of Motor Control Pulse Width Modulation (MCPWM).
Pre-conditions:
Returns
sl_status_t Status code indicating the result:
SL_STATUS_OK (0x0000) - Success.
SL_STATUS_INVALID_PARAMETER (0x0021) - The parameter is an invalid argument.
For more information on status codes, see SL STATUS DOCUMENTATION.
sl_si91x_pwm_reset_counter_disable#
sl_status_t sl_si91x_pwm_reset_counter_disable (sl_pwm_channel_t channel)
To disable the counter reset for the required channel of MCPWM.
| Type | Direction | Argument Name | Description |
|---|---|---|---|
| sl_pwm_channel_t | [in] | channel | Channel number (0 to 3) of type sl_pwm_channel_t. |
This API is used to disable the counter reset for the required channel of Motor Control Pulse Width Modulation (MCPWM).
Pre-conditions:
Returns
sl_status_t Status code indicating the result:
SL_STATUS_OK (0x0000) - Success.
SL_STATUS_INVALID_PARAMETER (0x0021) - The parameter is an invalid argument.
For more information on status codes, see SL STATUS DOCUMENTATION.